
Venkatraman Renganathan, Department of Automatic Control, Lund University will give the above talk on:
February 08, 2023 (Wednesday)
17:00 – 18:00 (including discussion)
Building S3|10 Room 406A and via Zoom
Abstract
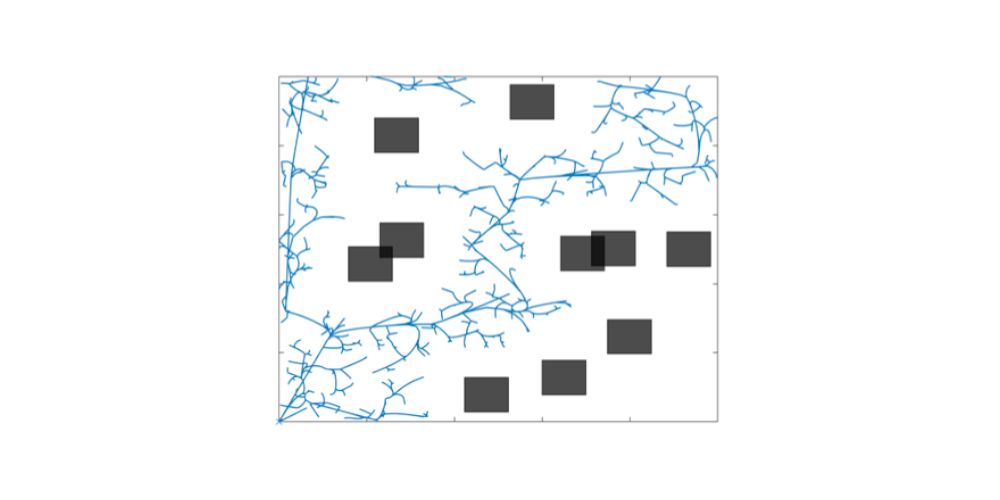
An integration of distributionally robust risk allocation into sampling-based motion planning algorithms for robots operating in uncertain environments is proposed. We perform non-uniform risk allocation by decomposing the distributionally robust joint risk constraints defined over the entire planning horizon into individual risk constraints given the total risk budget. Specifically, the deterministic tightening defined using the individual risk constraints is leveraged to define our proposed exact risk allocation procedure. Our idea of embedding the risk allocation technique into sampling-based motion planning algorithms realizes guaranteed conservative, yet increasingly more risk feasible trajectories for efficient state space exploration.
Short CV
Venkatraman Renganathan is a postdoctoral research fellow working with Dr. Anders Rantzer at the department of automatic control in Lund University, Sweden. Venkatraman was born in Nagercovil, Tamilnadu State, India. He finished his undergraduate studies in Electrical & Electronics Engineering from the Government College of Technology, Coimbatore, India. Venkatraman completed his Masters in Electrical Engineering from Arizona State University, USA where he worked with Dr. Armando Rodriguez on his thesis on Missile Target Engagement for bank-to-turn missiles. Subsequently, he moved to the University of Texas at Dallas for his PhD under Dr. Tyler Summers where he worked on security of cyberphysical systems and risk bounded motion planning using the distributionally robust optimization techniques.
His broad research interests include learning based and adaptive control, risk bounded motion planning, anomaly detection in cyber physical systems. Specifically, he is interested in quantifying the regret and conservatism of stochastic control algorithms that try to control stochastic systems whose distributions are not known exactly or known to lie in some ambiguity sets. This specific problem setting is commonly found in both control theory and robotics.
Guests via Zoom are welcome:
Meeting Link: https://tu-darmstadt.zoom.us/j/65224040100?pwd=WVczVm8wVDJ3R21iZVdtaG5Dc1ZmUT09
Meeting ID: 652 2404 0100
Pass Code: 429392

