
HILO-MPC
macHIne Learning and Optimization for Modeling, Prediction and Control
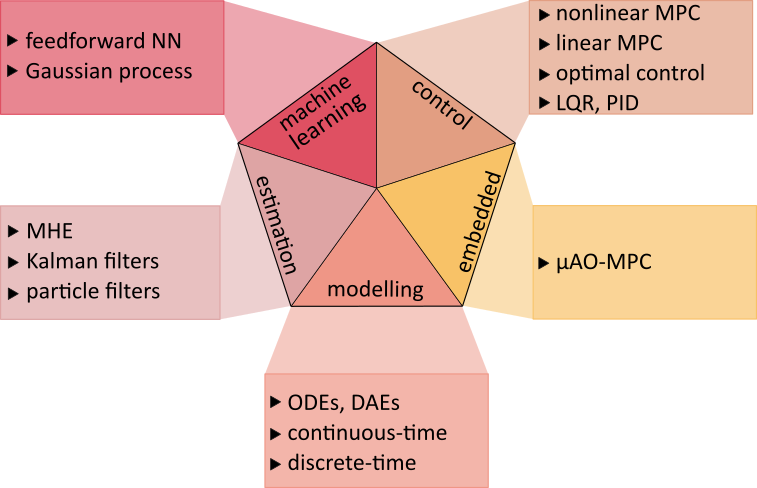
HILO-MPC is a Python toolbox for easy, flexible and fast realization of machine-learning-supported optimal control, and estimation problems developed at the Control and Cyber-Physical Systems Laboratory, TU Darmstadt, and the Laboratory for Systems Theory and Control, Otto von Guericke University. It is available freely on GitHub. It can be used for model predictive control, moving horizon estimation, Kalman filters, solving optimal control problems and has interfaces to embedded model predictive control tools. It aims towards research and education, with a focus on simplicity of use.
HILO-MPC can interface directly to TensorFlow and PyTorch to create machine learning models and the CasADi framework to efficiently build control and estimation problems. The machine learning models can be used (almost) everywhere in the setup of these problems.
Currently the following machine learning models are supported:
- Feedforward neural networks
- Gaussian processes
The following machine learning models are currently under development:
- Bayesian neural network
- Recurrent neural network
At the moment the following MPC and optimal control problems can be solved:
- Reference tracking nonlinear MPC
- Trajectory tracking nonlinear MPC
- Path following nonlinear MPC
- Economic nonlinear MPC
- Linear MPC
- Traditional optimal control problems
All the nonlinear MPCs support soft constraints, time-variant systems, time-varying parameters and can be used to solve minimum-time problems. They work for continuous-time and discrete-time models, in DAE or ODE form. Linear MPC is currently limited towards discrete-time models.
A rich set of examples is available, spanning:
- NMPC for bioreactors using hybrid first principle and learned models
- Trajectory tracking and path following model predictive control with learning and obstacle avoidance
- Output feedback MPC of a continuous stirred tank reactor with a Gaussian process prediction model
- Learning NMPC control using a neural network
- Simple LQR, PID
- Moving horizon estimation, extended Kalman filter, unscented Kalman filter, and particle filter for a continuous stirred tank reactor
Installation
HILO-MPC is a Python toolbox. You can use pip in Python to install HILO-MPC as follows:
pip install hilo-mpc
Documentation
A preliminary documentation can be found here. Note that this documentation is not complete and will be updated over time.
Citing HILO-MPC
If you use HILO-MPC for your research, please cite the following publication:
@misc{pohlodek2022hilompc,
title = {Flexible development and evaluation of machine-learning-supported optimal control and estimation methods via {HILO-MPC}},
author = {Pohlodek, Johannes and Morabito, Bruno and Schlauch, Christian and Zometa, Pablo and Findeisen, Rolf},
publisher = {arXiv},
year = {2022},
doi = {10.48550/ARXIV.2203.13671}
}
