
Karl Worthmann, Optimization-base Control Group, TU Ilmenau, will give the above talk on:
29.04.2024 (Monday)
16:00 – 17:00 (including discussion)
Building S3|10 Room 406A and via Zoom
Abstract
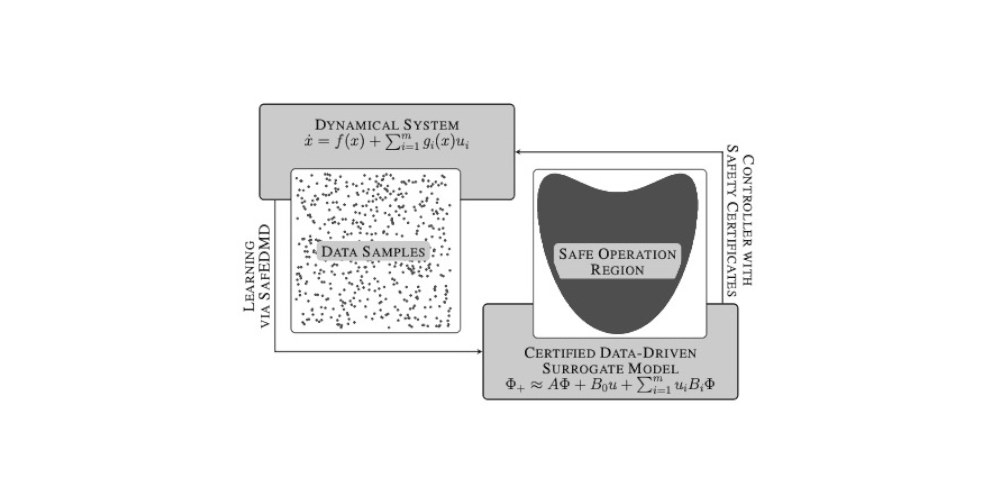
First, we briefly recap extended dynamic mode decomposition (EDMD) as a data-driven technique to predict quantities of interest along the flow of a nonlinear dynamical system. Then, we present an extension to control systems to derive (bi-)linear surrogate models and concisely discuss pros and cons of generator- and operator-based approaches. Hereby, we also present finite-data error bounds for data-driven approximations of the Koopman operator. Then, we revisit typical invariance assumptions and present potential remedies, e.g., by using kernel EDMD. Finally, we present recent results ensuring stability w.r.t. the closed-loop EDMDM-based surrogate models in the controller design – either using semi-definite programming and LMI-based techniques or within model predictive control.
Short CV
Karl Worthmann received his Ph.D. degree in mathematics from the University of Bayreuth, Germany, in 2012. 2014 he became assistant professor for “Differential Equations” at Technische Universität Ilmenau (TU Ilmenau), Germany. 2019 he was promoted to full professor after receiving the Heisenberg-professorship “Optimization-based Control” by the German Research Foundation. He was recipient of the PH.D. Award from the City of Bayreuth, Germany, and stipend of the German National Academic Foundation. 2013 he has been appointed Junior Fellow of the Society of Applied Mathematics and Mechanics (GAMM), where he served as speaker in 2014 and 2015. Karl Worthmann’s current research interests include systems and control theory with a particular focus on nonlinear model predictive control, stability analysis, and data-driven control.
Guests via Zoom are welcome:
Meeting Link: https://tu-darmstadt.zoom.us/j/65324628051?pwd=ZXQyZk1EYkExa01BMlVMU2hPRjRUUT09
Meeting ID: 653 2462 8051
Passcode: 569811

