Neue Veröffentlichung in Bioengineering „Hip Exoskeleton for Cycling Assistance“
09.07.2024
Hip Exoskeleton for Cycling Assistance
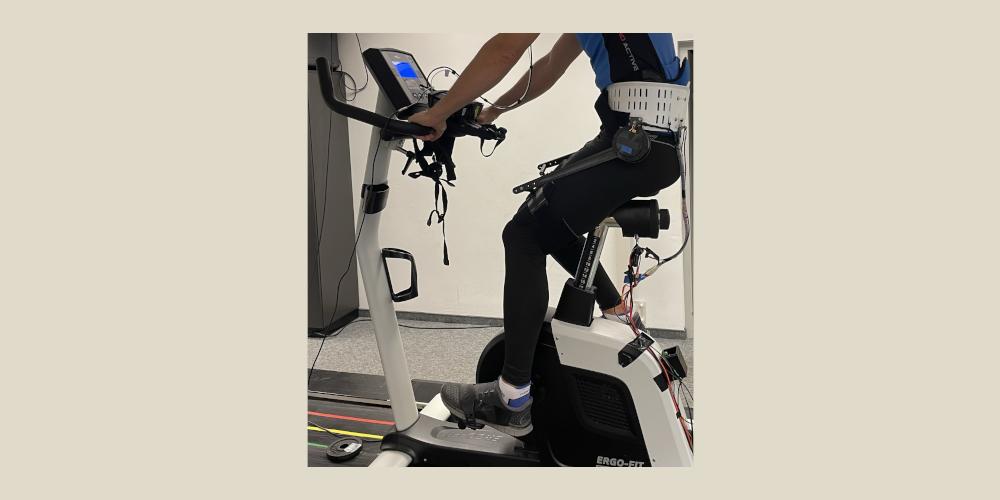
Cycling stands as one of the most widely embraced leisure activities and serves purposes such as exercise, rehabilitation, and commuting. This study aimed to assess the feasibility of assisting three unimpaired participants (age: 34.0 ± 7.9 years, height: 1.86 ± 0.02 m, weight: 75.7 ± 12.7 kg) using the GuroX hip exoskeleton, originally designed for walking assistance, during cycling against a resistance of 1 W/kg. The performance evaluation employed a sweep protocol that manipulated the timing of the exoskeleton’s peak extension and flexion torque in addition to human-in-the-loop optimization to enhance these timings based on metabolic cost. Our findings indicate that with a peak assistance torque of approximately 10.3 Nm for extension and flexion, the GuroX substantially reduced the net metabolic cost of cycling by 31.4 ± 8.1% and 26.4 ± 14.1% compared to transparent and without exoskeleton conditions, respectively. This demonstrates the significant potential of a hip exoskeleton developed for walking assistance to profoundly benefit cycling. Additionally, customizing the assistance strategy proves beneficial in maximizing assistance. While we attribute the average motor power to be a major contributor to the reduced cycling effort, participant feedback suggests that user comfort and synchronization between the user and exoskeleton may have played integral roles. Further research should validate our initial findings by employing a larger participant pool in real-world conditions. Incorporating a more diverse set of parameters for the human-in-the-loop optimization could enhance individualized assistance strategies.


