CCPS Seminar Farshad Khorrami: „Autonomous Vehicles: Resilient Sensor Fusion and Security“
Freitag, 27. Januar 2023, 12:45 Uhr, Gebäude S3|10 Raum 406A and via zoom
27.01.2023
Herr Prof. Farshad Khorrami, Control/Robotics Research Laboratory (CRRL), Department of Electrical & Computer Engineering, NYU Tandon School of Engineering (Polytechnic Institute), New York University wird an dem o.g. Termin folgenden Vortrag halten:
12:45 – 13:45 Uhr (einschließlich Frage- und Diskussionsrunde): „Autonomous Vehicles: Resilient Sensor Fusion and Security“
Abstract:
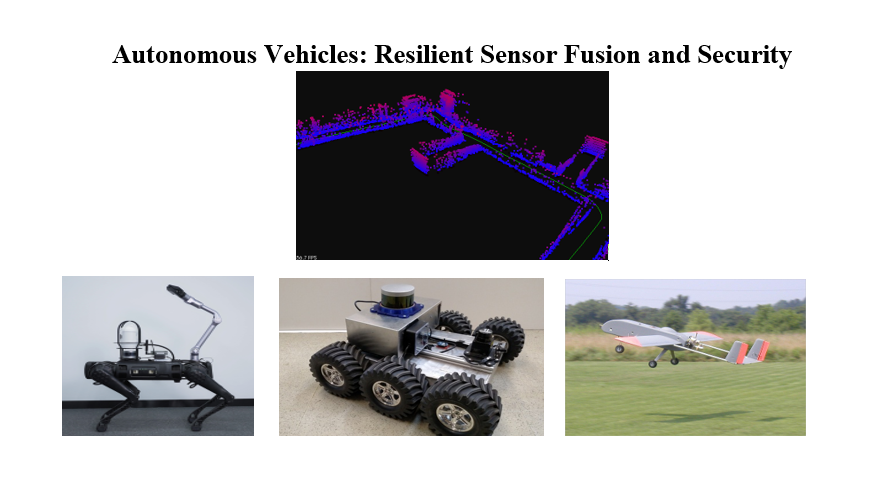
The development of autonomous unmanned vehicle technologies and their deployment involves several core challenges in vehicle design, sensor data processing, data fusion, localization, navigation, world modeling, obstacle avoidance, path planning, collaborative mission planning and formation maneuvering, distributed sensing and monitoring, and control. Environment perception and autonomous navigation using real-time sensor data in uncertain environments is a crucial capability for robotic vehicles. To this end, this talk will focus on machine learning based approaches for autonomous navigation of ground vehicles in unknown environments. Specifically, an end-to-end learning framework for real-time fusion of raw sensor data from camera and LIDAR will be presented. Experimental studies on small unmanned vehicles (ground and aerial platforms) will be presented including analyses of the proposed methodology to various types of sensor noise/nonidealities, sensor failures, occlusions, and environment variations. While the proposed end-to-end learning approach provides these strong robustness properties, it will then be shown that specifically crafted perturbations (adversarial perturbations) both in camera and LIDAR data can still generate undesirable behaviors. Lastly, methods to alleviate such fragility of learning based systems to adversarial perturbations will be presented based on generative adversarial learning based techniques and control barrier functions.
Short CV:
Farshad Khorrami received his bachelors degrees in Mathematics and Electrical Engineering in 1982 and 1984 respectively from The Ohio State University. He also received his Master's degree in Mathematics and Ph.D. in Electrical Engineering in 1984 and 1988 from The Ohio State University. Dr. Khorrami is currently a professor of Electrical & Computer Engineering Department at NYU where he joined as an assistant professor in Sept. 1988. His research interests include system theory and nonlinear controls, robotics, machine learning, cyber physical system security, autonomous unmanned vehicles, embedded system security, and large-scale systems and decentralized control. Prof. Khorrami has published more than 300 refereed journal and conference papers in these areas. His book on “modeling and adaptive nonlinear control of electric motors” was published by Springer Verlag in 2003. He also has fourteen U.S. patents on novel smart micro-positioners and actuators, embedded system security, and wireless sensors and actuators. He has developed and directed the Control/Robotics Research Laboratory at Polytechnic University (Now NYU) and Co-Director of the Center for Artificial Intelligence and Robotics at NYU Abu Dhabi. His research has been supported by the Army Research Office, National Science Foundation, Office of Naval Research, DARPA, Dept. of Energy, Sandia National Laboratory, Army Research Laboratory, Air Force Research Laboratory, NASA, and several corporations. Prof. Khorrami has served as general chair and conference organizing committee member of several international conferences. He has also commercialized UAVs as well as development of auto-pilots for various unmanned vehicles.
Gäste über Zoom sind herzlich willkommen.
Meeting Link: https://tu-darmstadt.zoom.us/j/67194985505?pwd=QUNBZUtRZDMzb1JIM2c0dTZBcFVxZz09
Meeting ID: 671 9498 5505
Pass Code: 950411


